Submitted by Kevin McLeod, University of Wisconsin-Milwaukee
In this note, I would like to present one recurring issue that surfaced in the discussions of the GeT Transformation Geometry Working Group, and a partial resolution of that issue, contained in a suggestion by one of the reviewers of our chapter in the forthcoming GeT volume McLeod et al., in press). More details of the axioms involved can be found in Venema (2011) and McLeod et al. (in press).
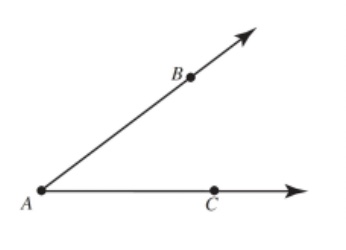
The issue in question was angle measure. For example, it is by two rays with a common endpoint. The figure therefore shows just one angle-although in my experience about half of all students will say it shows two-which presumably How many angles in this figure? therefore has just one measure. As group members pointed out, however, it is a common practice to refer to both interior and exterior measures of the angle. Other questions arose as to the range of possible angle measures: some group members allowed only angle measures between 0◦ and 180◦; some allowed angle measures up to 360◦; some allowed negative angle measures to describe clockwise rotations, as is routinely done in trigonometry. An additional recurring issue was that of distinguishing between the measure of an angle, and the measure of an amount of turn.
In a typical transformations-based approach to geometry, the SAS Triangle Congruence Postulate is demoted from the status of an axiom, and is replaced by one or more axioms stating the existence and properties of certain classes of distance-preserving transformations. For example, Venema (2011, Chapter 10) proposes a reflection axiom:
(The Reflection Postulate) For every line ℓ, there exists a function ρl from the plane to itself, called the reflection across ℓ, which satisfies the following conditions:
- If P lies on ℓ then ρℓ(P) = P;
- If P lies in one of the half-planes bounded by ℓ then ρℓ(P) lies in the opposite half-plane;
- ρℓ takes lines to lines;
- ρℓ preserves distances and angle measures.
We note that the transformations mentioned in the Common Core State Standards for Mathematics (National Governors Association Center for Best Practices & Council of Chief State School Officers, 2010) include translations, rotations, and reflections, but since translations and reflections can be constructed as compositions of reflections, an axiom for reflections is logically sufficient. For pedagogical reasons, however, one might choose to have separate axioms for translations and reflections, as we did in our chapter. In the original submission of our manuscript, we included the following version of the Rotation Postulate:
(The Rotation Postulate, initial version) For every point C, and every real number r with 0 < r < 180, there exists a function Rr,C from the plane to itself, called the rotation about C through r◦, which satisfies the following conditions:
- Rr,C(C) = C;
- If P ≠ C then Rr,C(P) = P′, where P′C = P C, m(∠P CP′) = r◦, and the shorter direction from P to P′ around the circle with center C and radius CP is measured counter-clockwise;
- Rr,C takes lines to lines;
- Rr,C preserves distances and angle measures.
The reviewer pointed out that ‘It’s a bit ungainly that the Rotation Postulate refers to angle measure whereas the translation postulate does not refer to distance measure,’ and suggested a modification of the Rotation Postulate, which led to the final version in our chapter:
(The Rotation Postulate, final version) For every point C, and every pair of distinct rays r and r′ with common endpoint C, there exists a function RC,r,r′ from the plane to itself, called a rotation around C, which satisfies the following conditions:
- RC,r,r′(C) = C;
- If P ≠ C, then RC,r,r′(P) ≠ P;
- RC,r,r′ takes r to r′;
- RC,r,r′ takes lines to lines;
- RC,r,r′ preserves distances and angle measures.
Not only does this version of the postulate make no reference to angle measure, or the amount of turn, it also does not mention the direction of rotation. In this, it is much more akin to the modern idea of a transformation as a mapping, or function, from the plane to itself, rather than an actual ‘rigid motion’.
The reader may find it interesting to prove the SAS congruence criterion, using transformation axioms. Some questions:
- Can you prove the SAS criterion using only the Reflection Axiom?
- What advantages do you see to having axioms for all three types of rigid motion? In particular, does this extra flexibility allow for easier, or pedagogically preferable, proofs of SAS?
- What advantages do you see to the final version of the Rotation Postulate over the earlier version
- (Extra credit!) Where else might one de-emphasize angle measure, if one takes a resolutely transformational approach to high school geometry?
References
[1] McLeod, K., Sears, R., Lai, Y., St Goar, J. & Prasad, P.V. (to appear). Promoting rigor and proof via a transformations-based approach for isometries-based lessons in the Geometry for Teachers course, in The GeT Course: Resources and Objectives for the Geometry Course for Teachers.
[2] National Governors Association Center for Best Practices [NGA], & Council of Chief
State School Officers [CCSSO]. (2010). Common core state standards for mathematics.
Available at https://www.thecorestandards.org/Math/
